MOMART Datasets and Experiments
Contents
MOMART Datasets and Experiments#
Overview#
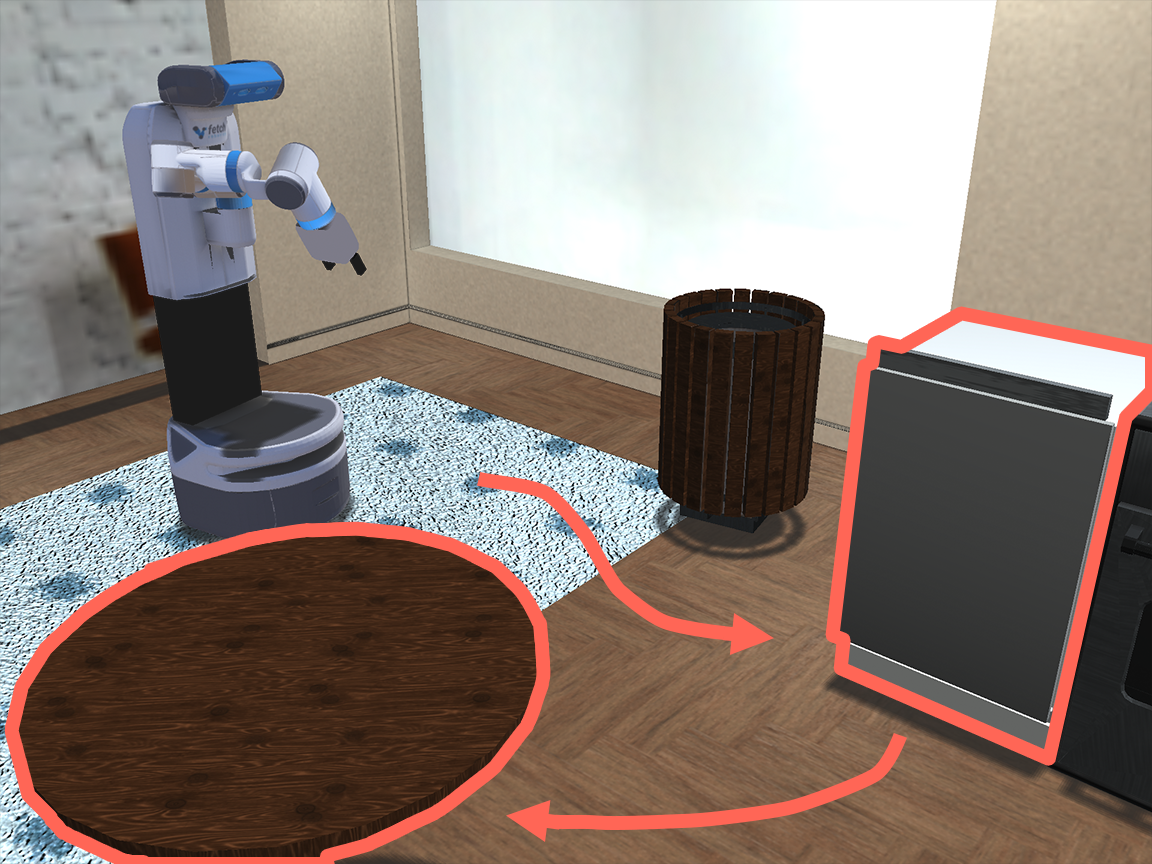
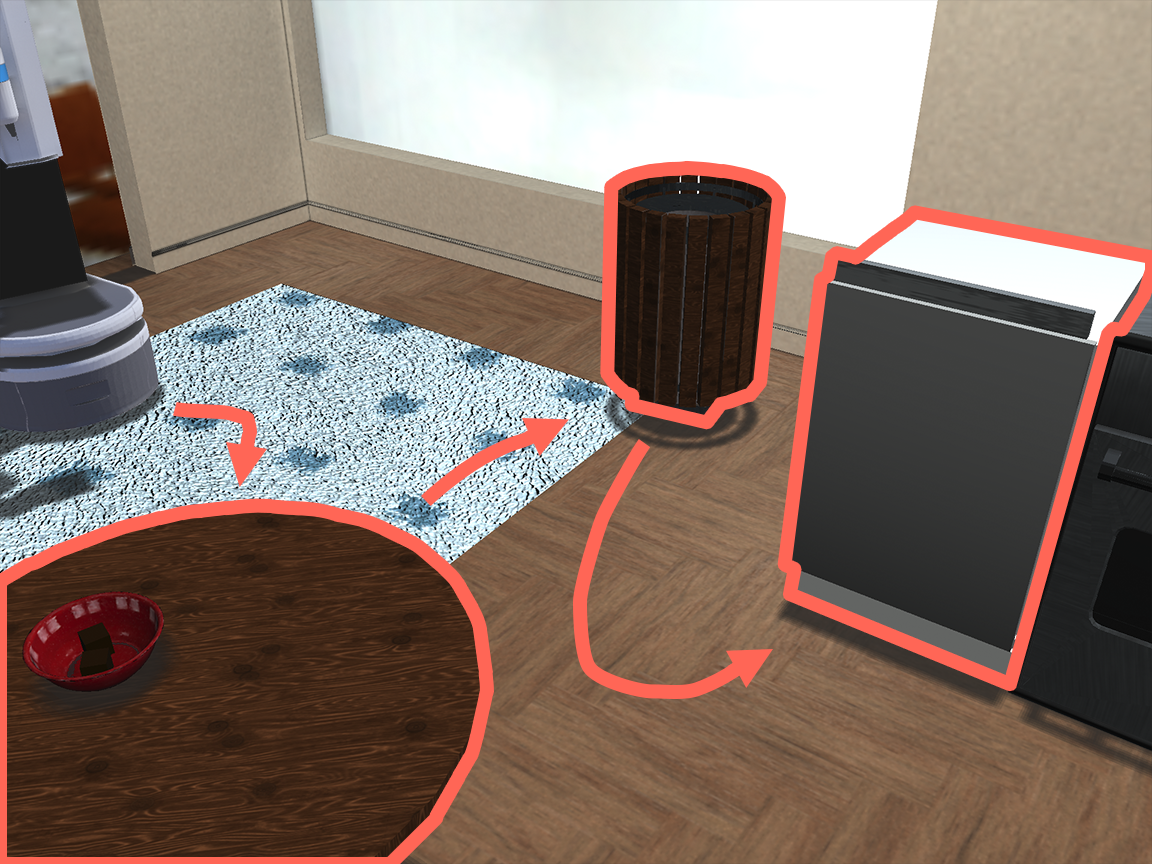
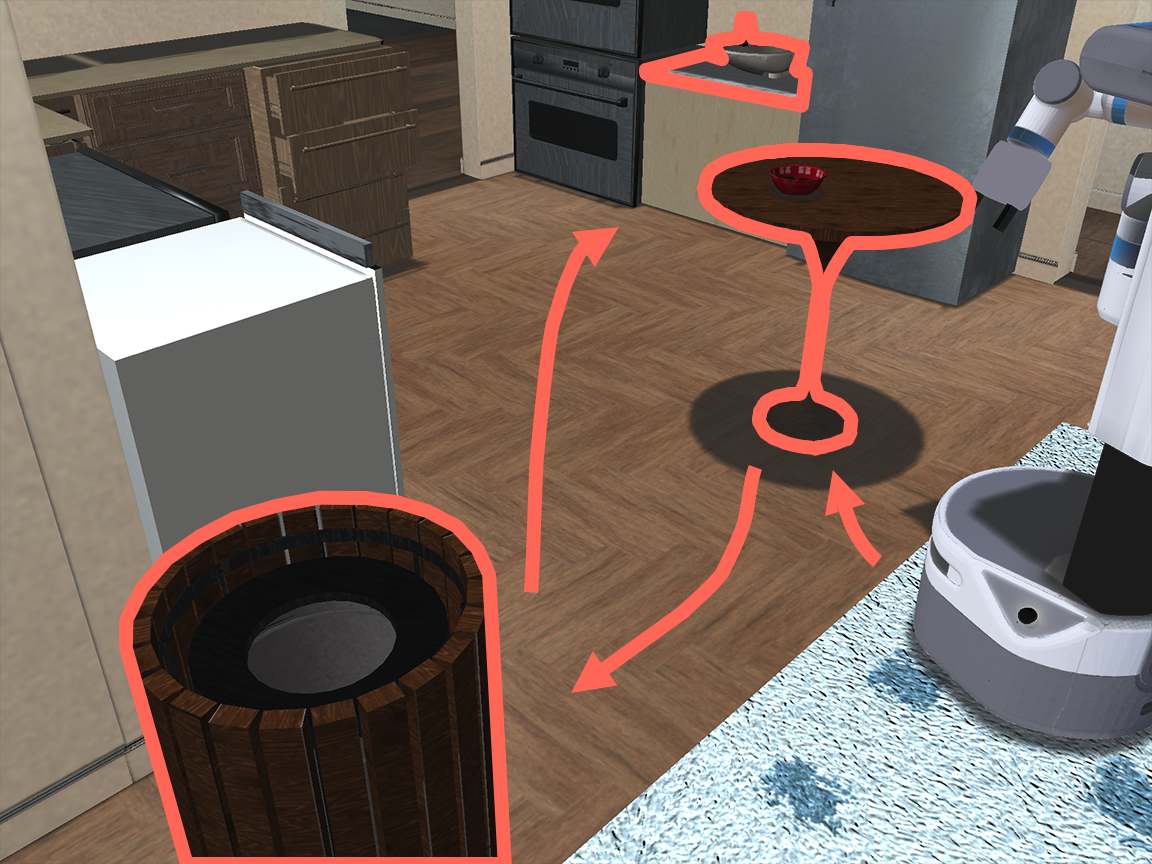
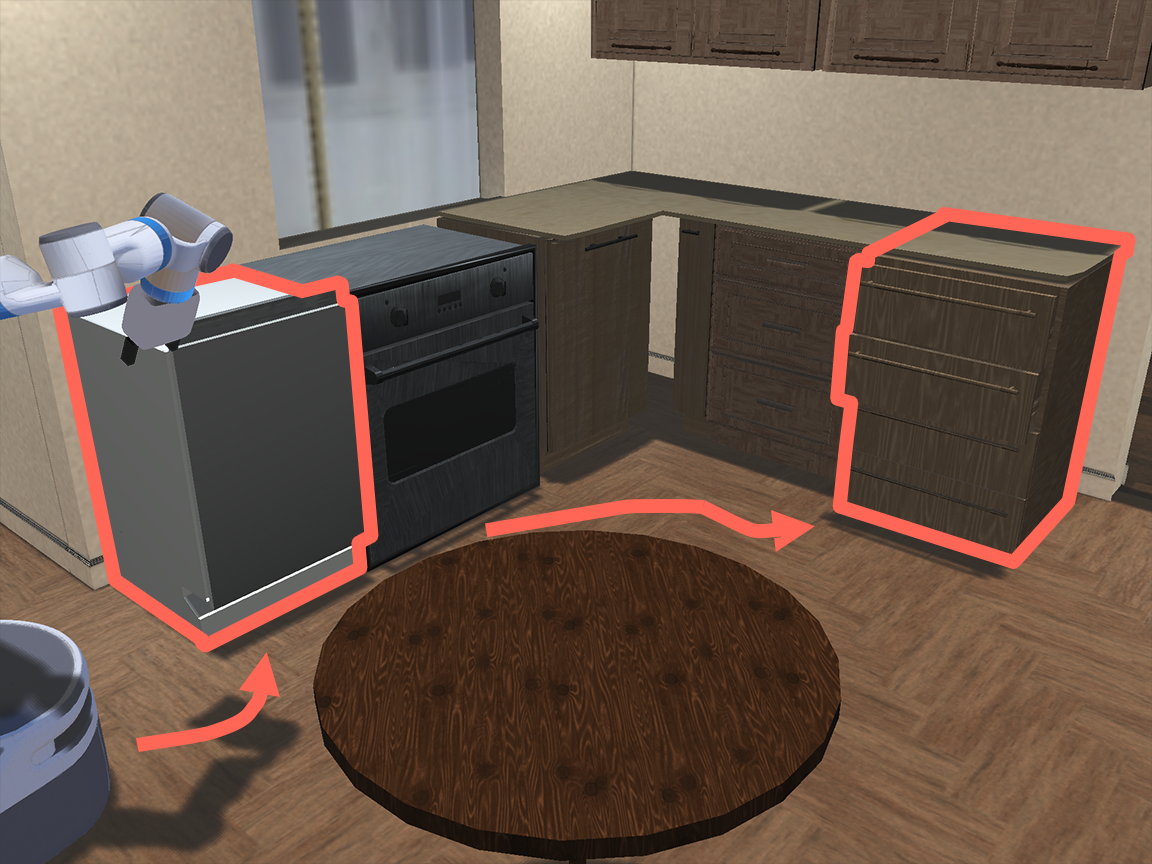
Mobile Manipulation RoboTurk (MoMaRT) datasets are a collection of demonstrations collected on 5 long-horizon robot mobile manipulation tasks in a realistic simulated kitchen.




Downloading#
Warning!
When working with these datasets, please make sure that you have installed iGibson from source and are on the momart branch. Exact steps for installing can be found HERE.
We provide two ways for downloading MOMART datasets:
Method 1: Using download_momart_datasets.py (Recommended)#
download_momart_datasets.py is a python script that provides a programmatic way of installing all datasets. This is the preferred method, because this script also sets up a directory structure for the datasets that works out of the box with examples for reproducing MOMART paper’s results.
# Use --help flag to view download and <ARG> options
python <ROBOMIMIC_DIR>/robomimic/scripts/download_momart_datasets.py <ARGS>
Method 2: Using Direct Download Links#
For each type of dataset, we also provide a direct download links that will download the raw HDF5 file HERE.
Postprocessing#
No postprocessing is needed for these datasets!
Citation#
@inproceedings{wong2022error,
title={Error-Aware Imitation Learning from Teleoperation Data for Mobile Manipulation},
author={Wong, Josiah and Tung, Albert and Kurenkov, Andrey and Mandlekar, Ajay and Fei-Fei, Li and Savarese, Silvio and Mart{\'\i}n-Mart{\'\i}n, Roberto},
booktitle={Conference on Robot Learning},
pages={1367--1378},
year={2022},
organization={PMLR}
}