Overview
Overview#
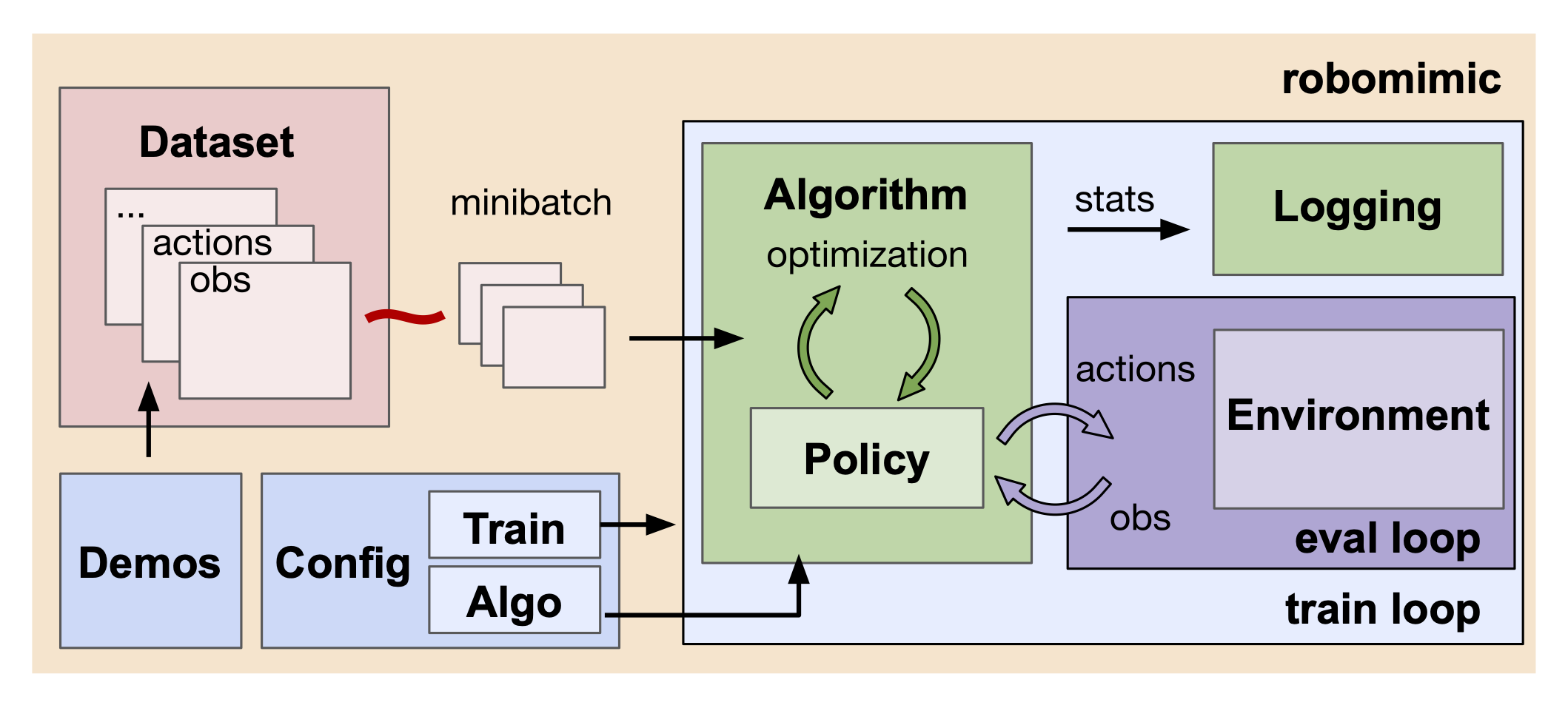
The robomimic framework consists of several modular components that interact to train and evaluate a policy:
Experiment config: a config object defines all settings for a training run
Data: an hdf5 dataset is loaded into a dataloader, which provides minibatches to the algorithm
Training: an algorithm object trains a set of models (including the policy)
Evaluation: the policy is evaluated in the environment by conducting a set of rollouts
Logging: experiment statistics, model checkpoints, and videos are saved to disk
These modules are encapsulated by the robomimic directory structure:
examples: examples to better understand modular components in the codebaserobomimic/algo: policy learning algorithm implementationsrobomimic/config: default algorithm configsrobomimic/envs: wrappers for environments, used during evaluation rolloutsrobomimic/exps/templates: config templates for experimentsrobomimic/models: network implementationsrobomimic/scripts: main repository scriptsrobomimic/utils: a collection of utilities, including the SequenceDataset class to load datasets, and TensorUtils to work with nested tensor dictionaries